Evo brzinski update, pa da trazim pomoc, jer imam problem, tacnije dva :)
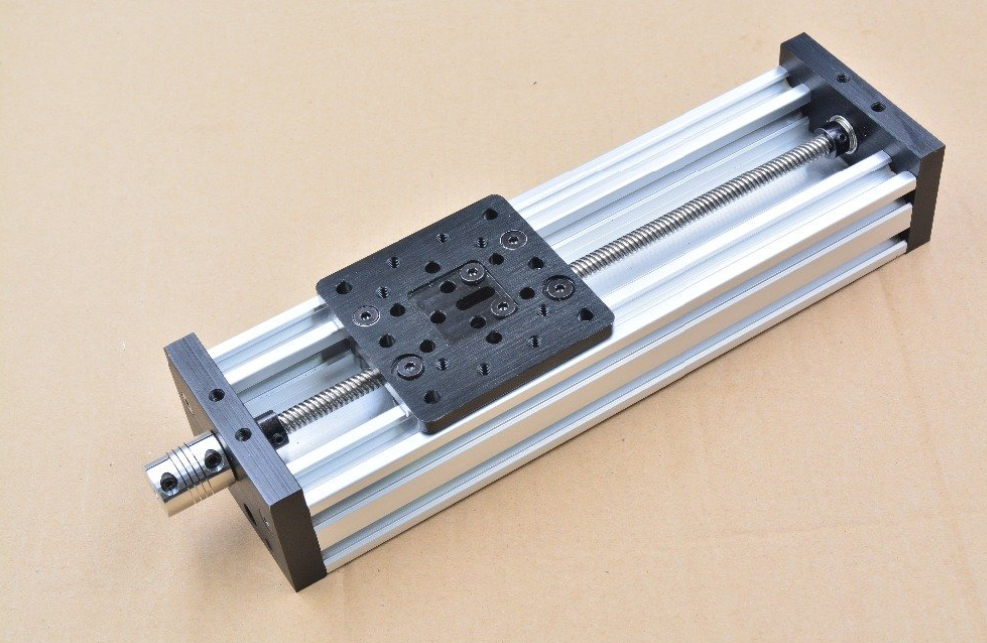
"Kesh, kolica i smekerica" sto bi rekao Djus su stigla juce, povezao na motor provizorno, generalno ok radi, utegnuta su i onako kako sam ocekivao, malo se ciju vise nego sto sam ocekivao, ali ok. Cekam da nam nas majstor napravi nosac za motor, pa da to bude skroz funkcionalno.
Prvi problem:
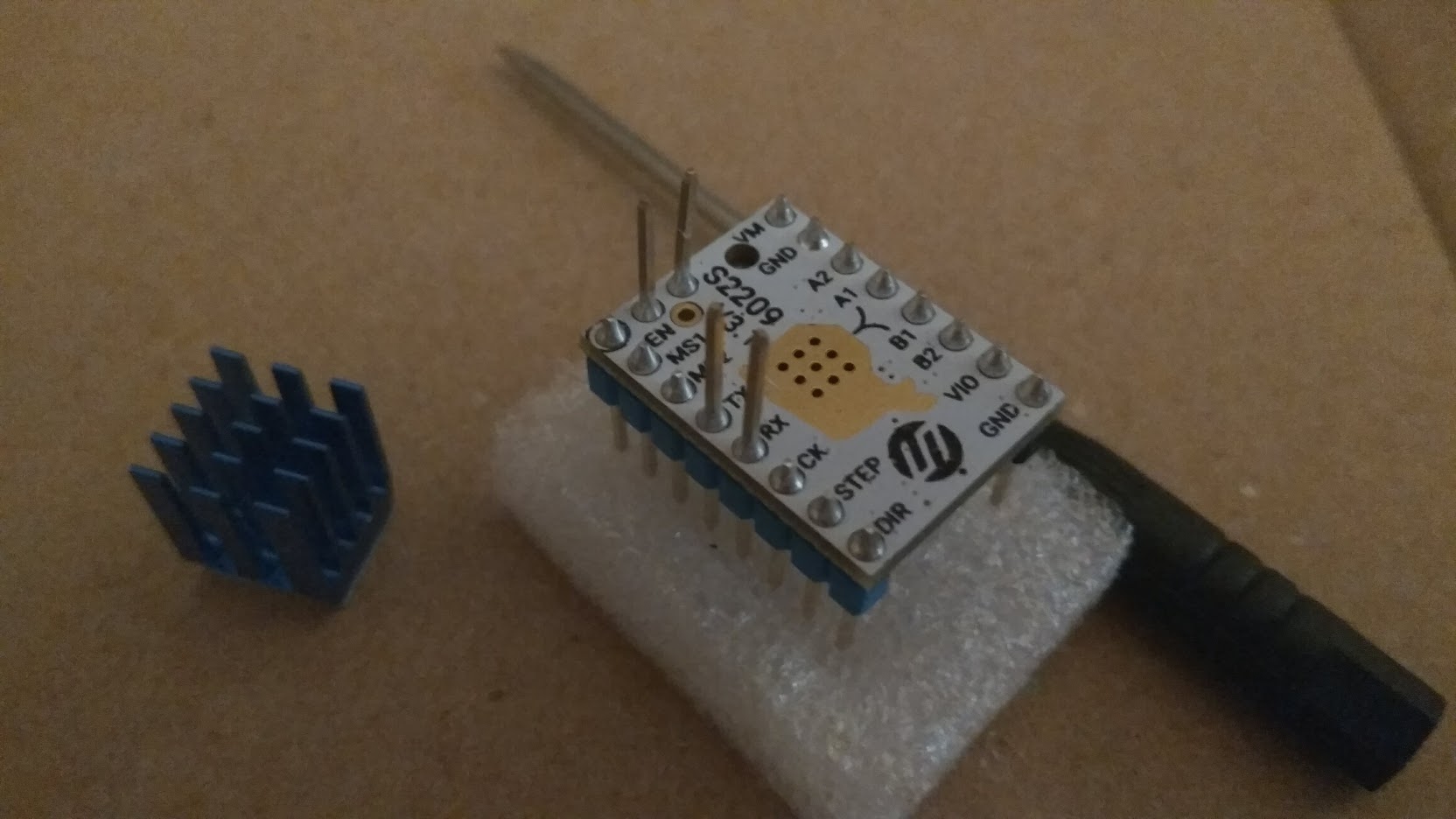
Motor pogoni trenutno TMC2209 medjutim vidim da on ne radi u full step rezimu i ne nalazim nigde opciju da se prebaci u taj rezim. Mozda ima neka opcija kontrolom kroz uart, ali to ne znam da koristim. Da li moze da radi full step, procitao sam sinoc 2x datasheet, ali nigde se ne spominje to. Koliko sad vidim za 1 rotaciju mu treba 1600 stepova. Povezan je zicama dzamperima direktno na arduino, motor i napajanje kao sto je bio i a4988 stim sto sam dodatno povezao i pin enable na arduino. Pinovi koje ne koristim su ostali da vise u vazduhu (M1, MS2, SPREAD, UART), video sam sinoc da je potrebno povezati ih na gnd ili vcc ali i dalje ne vidim konfiguraciju za full step.
Drugi problem:
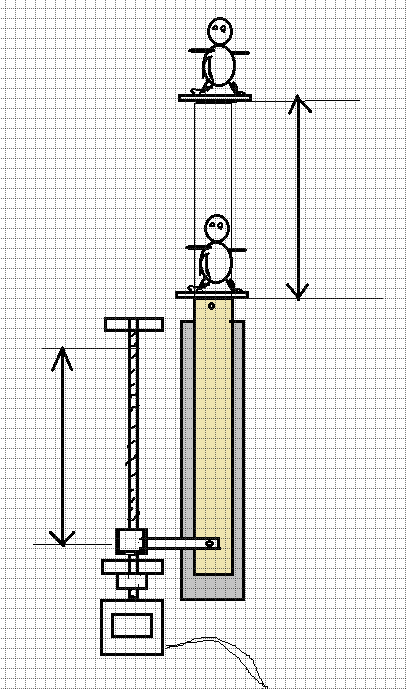
Do sada sam koristio pomeranje predmeta tako sto sam zadavao odredjeni broj stepova za napred i nazad, kako je ovde vreteno duze, upisao sam veci broj stepova, a kako je trenutno za 1 okret treba 1600 rotacija, sve preko 32000 koje upisem rezultuje da vise ne stane dok ne udari u jednu ili drugu stranu. Koliko vidim treba nekih 40 okretaja vretena iz pocetnog u krajnji poloz.a Duzina vretena unutar kolica je 400mm. Takodje treba odbiti sam pokretni nosac koji je 8 x 8cm pa je ukupna korisna duzina 32cm.
Koristio sam ovu for petlju:
for(int x = 0; x < 32000; x++)
Posle sam pokusao da prevarim sistem, promenio sam na:
const int STEPS = 1600;
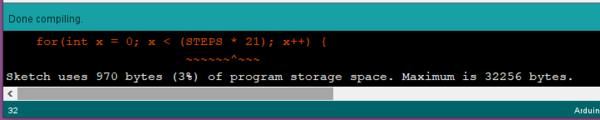
for(int x = 0; x < (STEPS * 20); x++)
I, naravno sve sto rezultuje vishe od 32000 mnozenjem ponasa se isto. U prvom primeru verifikacija ne pokaze nista, u drugom primeru pokazuje mi ovu gresku:
 [Ovu poruku je menjao SASA M. dana 30.06.2021. u 17:29 GMT+1]
[Ovu poruku je menjao SASA M. dana 30.06.2021. u 17:31 GMT+1]
[Ovu poruku je menjao SASA M. dana 30.06.2021. u 17:29 GMT+1]
[Ovu poruku je menjao SASA M. dana 30.06.2021. u 17:31 GMT+1]

 Re: Arduino uno, slaba ponuda servo motora za hobby na domacem trzistu.
Re: Arduino uno, slaba ponuda servo motora za hobby na domacem trzistu.


 Registrovani: 11 ( boro62promaja, Jpeca, dava, Majestic, madamov, djoka_l, B3R1, djura63, whitie2004, test1234, nato_bot )
Registrovani: 11 ( boro62promaja, Jpeca, dava, Majestic, madamov, djoka_l, B3R1, djura63, whitie2004, test1234, nato_bot )
 Re: Arduino uno, slaba ponuda servo motora za hobby na domacem trzistu.
Re: Arduino uno, slaba ponuda servo motora za hobby na domacem trzistu.